
Reachable Sets for Safe, Real-Time Manipulator Trajectory Design

Provably-safe motion planning for manipulators.
Characterizing human stability during Sit-to-Stand
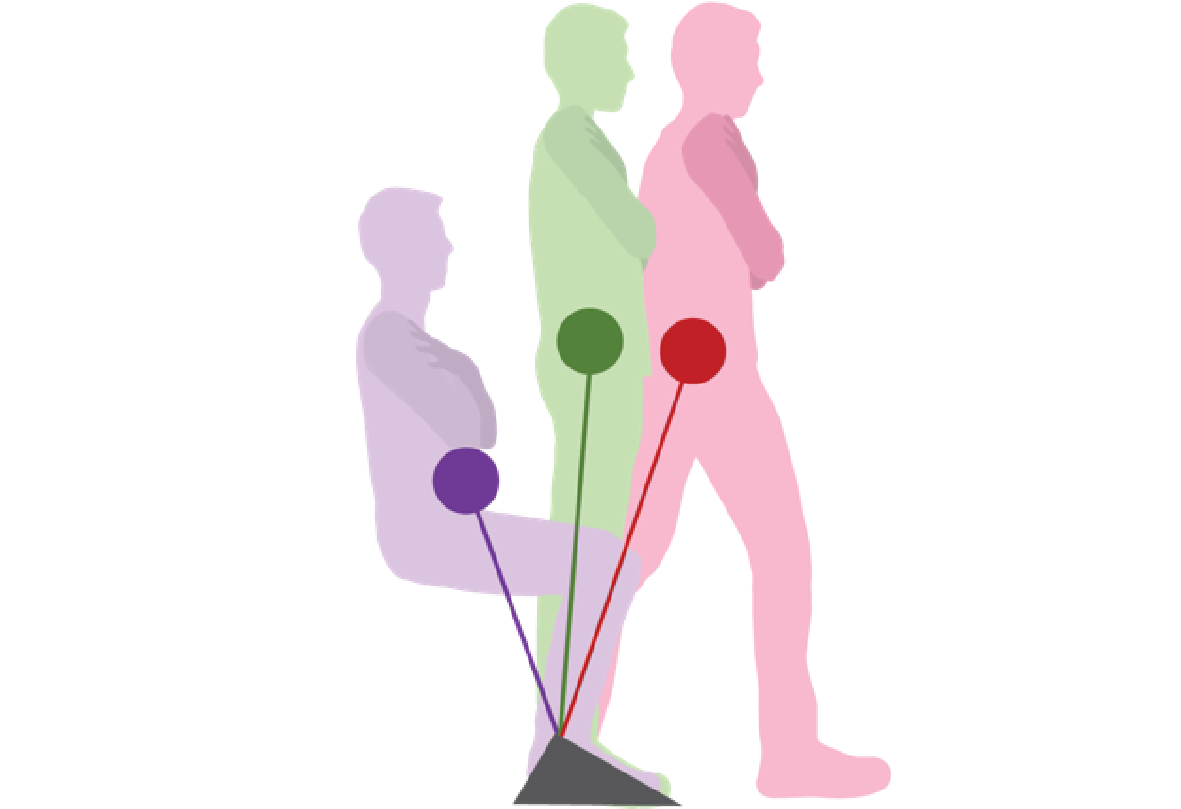
A perturbative experiment with 11 subjects validates the Stability Basin approach.
Safe, Aggressive Quadrotor Flight via Reachability-based Trajectory Design
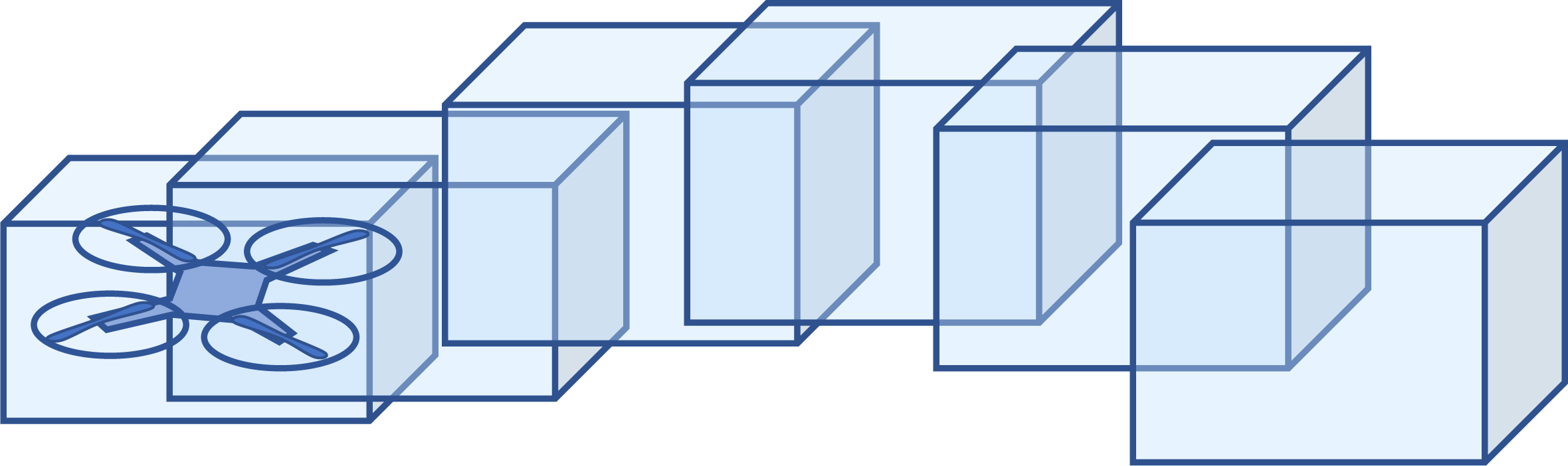
Provably-safe motion planning for quadrotors.
Predicting Sagittal-Plane Swing Hip Kinematics in Response to Trips
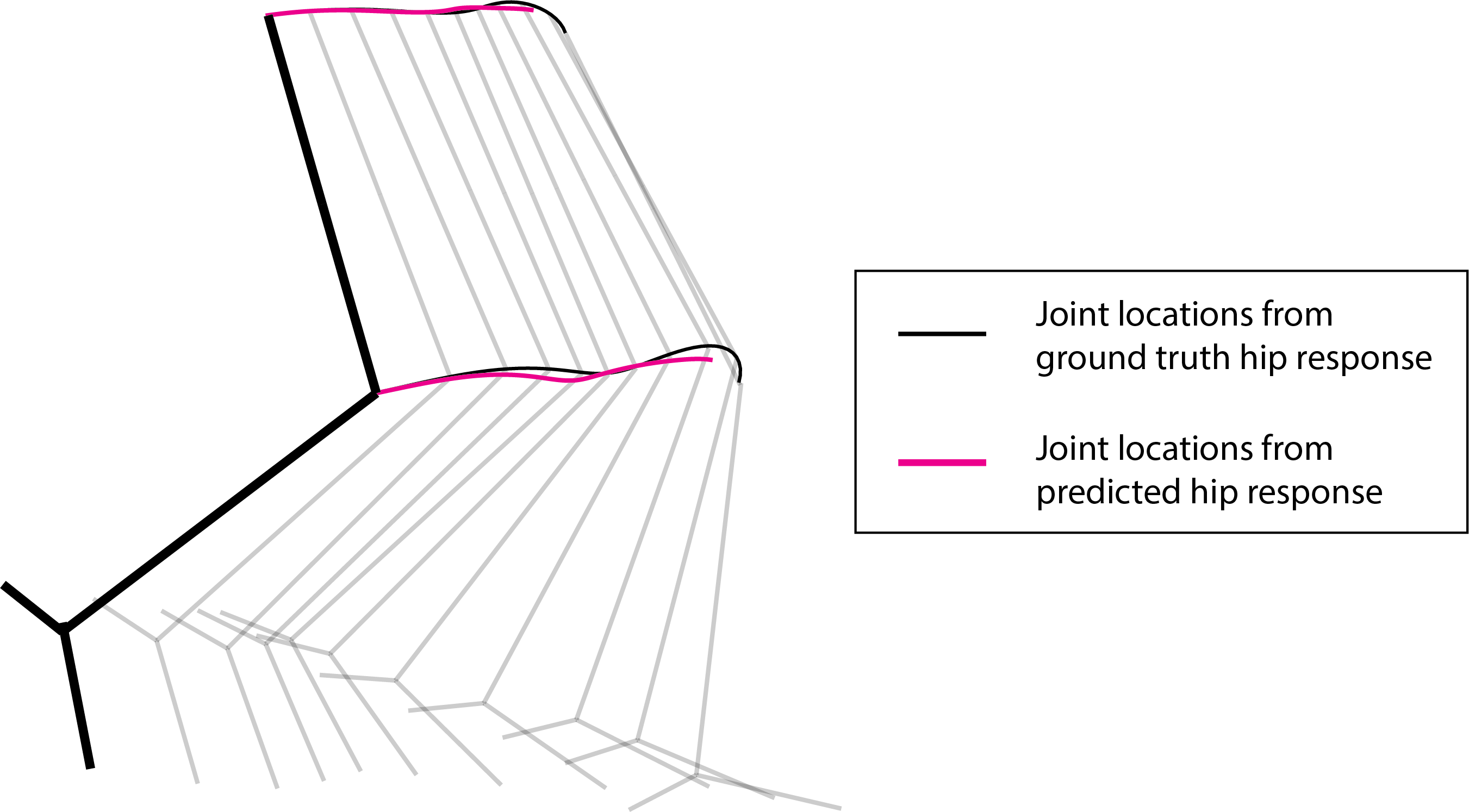
A Gaussian Process Regression model is validated using data from a 16-subject tripping experiment.
Real-Time Trip-Recovery Planning in Robotic Prostheses using Predicted Sets of Human Motion
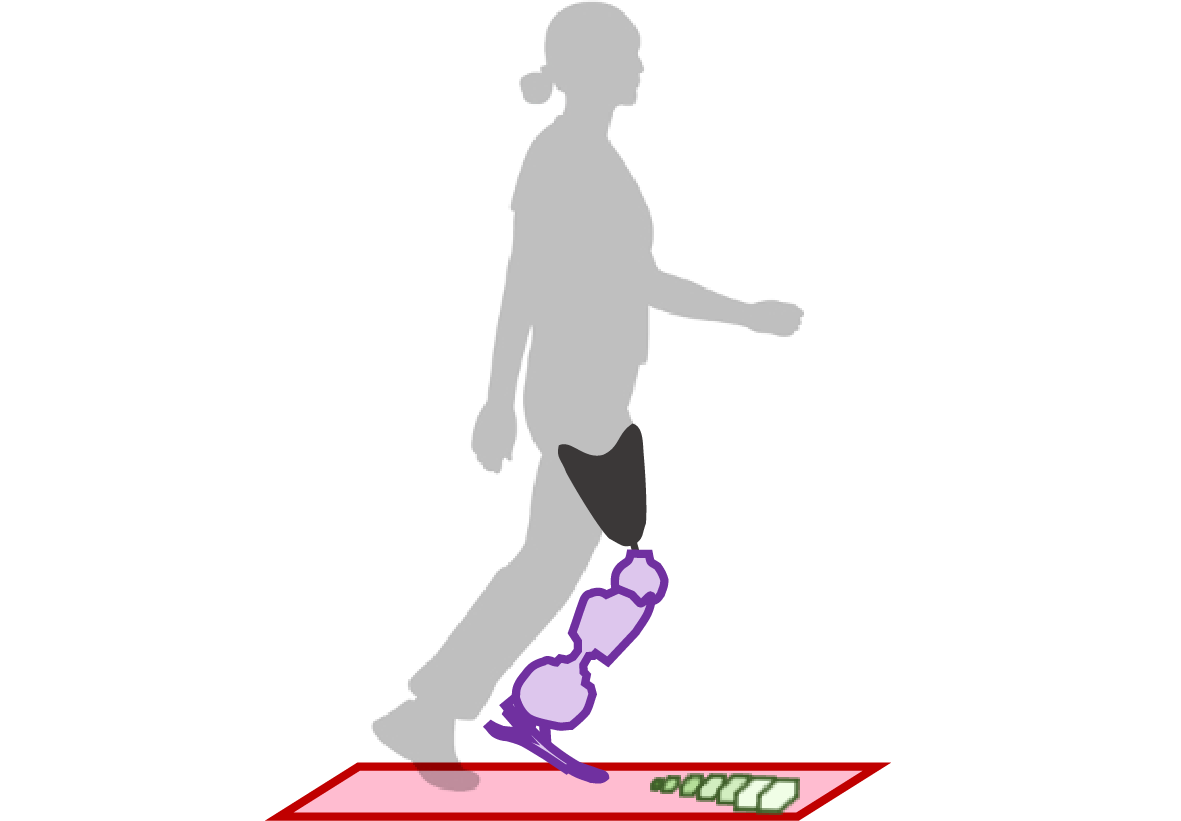
Online trip recovery planning for robotic prosthetic legs.
Certifiably-optimal 3D Human Pose Reconstruction
Sums-of-Squares optimization for producing 3D human pose estimates that are certified as globally optimal.
Automated Camera-Based Estimation of Rehabilitation Criteria Following ACL Reconstruction
Assessing ACL reconstruction rehabilitation from camera data using markerless pose estimation.
N-step reachability to characterize human mediolateral stability during perturbed walking.
How many steps until I recover from a sudden lateral perturbation?